rxr-ym80000d / rxr-ym100000d հրդեհազերծման ծխը մարող ռոբոտ
- ընդհանուր պատկերացում
- կապված ապրանքներ
արտադրանքի համապարփակ տեսանկյունից.
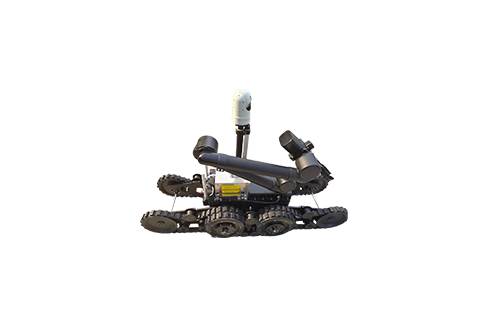
հրդեհածաղիկային ռոբոտը խելացի բազմաֆունկցիոնալ հրդեհածաղիկային ռոբոտ է, որը ծխի արտազատման, հրդեհածաղիկների, օդի մատակարարման, սառեցման, փոշու հեռացման, խոչընդոտների հեռացման,
այն կարող է օգտագործվել ճանապարհային (ջնջուղային) թունելի հրդեհների, ստորգետնյա օբյեկտների եւ բեռնատար կայանի հրդեհների, երկարատեւ տարածքի հրդեհների, նավթաքիմիական նավթային պահեստի եւ մաքրման գործարանի հրդեհների, մեծ տարած
արտադրանքի առանձնահատկությունները.
շրջակա միջավայրի հայտնաբերման գործառույթ
ավտոմատ բարձրացման հարթակը հագեցած է շրջակա միջավայրի հայտնաբերման սենսորներով, որոնք տեղում տարբեր բարձրություններում հայտնաբերում եւ վերլուծում են թունավոր եւ բորբոքելի գազեր (ռադիոակտիվ նյութերի հայտնաբերումը կամավոր է):
պատկերների ձեռքբերման գործառույթ
նկարներ վերցնել եւ վերբեռնել իրական ժամանակում:
արտադրանքի առավելությունները.
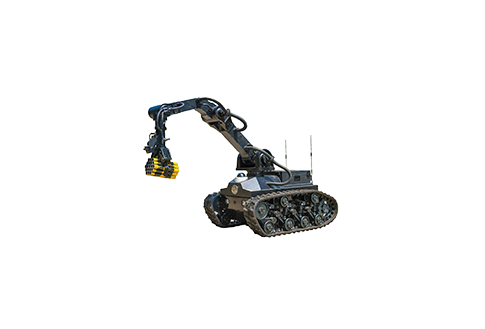
● եռանկյուն երթուղային փոխադրող մեխանիզմի նախագիծը, բարելավելով ռոբոտի քայլելու կայունությունը,
● դիզելային շարժիչով երկու փոփոխական պոմպային հզորության համակարգի նախագիծ, ուժեղ հզորություն, դիմացկունություն,
● քամու գնդակը ընդունում է հիդրավլիկ բարձրացման եւ հենման մեխանիզմի նախագիծ, որը կարող է ջրի խավարը ցնցել բազմաչափ կրակի ծխի արտազատման համար եւ վերացնել թունավոր եւ վնասակար ծխի մասնիկները: ինտելեկտուալ կապը
● ռոբոտի առջեւի հատվածը հագեցած է պղպեղային սարքավորմամբ, որը կարող է օգտագործվել խոչընդոտները վերացնելու համար բարդ հրդեհային վայրերում,
● այն կարող է արագ տեղադրել արտաքին փրկարար սարքեր, ինչպիսիք են հիդրավլիկ սահելն ու դիֆուզորը 60mpa աշխատանքային ճնշման հետ, փրկարարության դժվարությունը նվազեցնելու եւ փրկարարության արդյունավետությունը բարելավելու համար,
● համակարգը ընդունում է բարձր ջերմաստիճանի դիմացկուն նախագիծ, ինքնաթափանցող սառեցման սարքի բազմաթիվ խմբերով,
● փակ օդափոխիչային շարժիչ եւ բեռային զգայուն խառնաշփոթային երկշրջանային հիդրավլիկ համակարգ, բարձր փոխանցման արդյունավետություն, ցածր ջերմություն,
● էլեկտրահիդրավլիկ կոշտ սերվո կառավարման համակարգ, ճշգրիտ վերահսկել ռոբոտը քայլել ուղիղ գծում: