

露天鉱山のトラック検査ロボット
- 概要
- 関連製品
製品概要
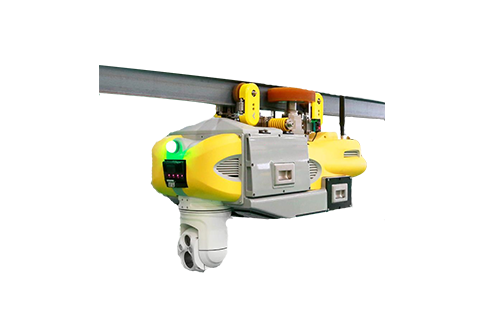
表面地雷検査ロボットは (以下"検査ロボット"と称される) 主に5つの部分で構成されています. ロボットボディ,ベースステーション,充電ステーション,トラックシステム,監視プラットフォーム. ロボットボディはトラックに吊り付けられ,相互に動いて,検査作業員を完全に置き換えることができます. 検査ロボットは
検査ロボットは様々なセンサーを搭載し,現場画像,音声,赤外線熱画像,温度パラメータをリアルタイムで取得し,知的識別機能を持ち,知覚鍵技術アルゴリズムを採用し,機器の現在の動作状態を正確に判断することができ,ビッグデータ分析早期警告技術に基づいて,機器の動作故障を事前に予測し警告し,
製品の特徴:
画像取得機能
低照明HDカメラと充電ライトシステムが組み合わせると,低照明でも明確な画像が得られます.
赤外線熱画像取得機能
ロボットは赤外線熱画像装置を装備し,ローラー,ベルト表面,線路の可視部位,ローラー,モーターの異常温度をリアルタイムで測定し判断し,検出された機器の加熱状況を記録し分析し,機器の異常温度を警告する.
音声分析機能
音の収集に高感度ピックアップを使用し,無動車,ロール,モーター,その他の異常音声を判断します. 知的分析と処理を通じて,フィールド機器を判断します.
2方向の音声インターフォン機能
ロボットは,リアルタイム音声インターコムを実現できる先進的な双方向音声インターコムシステムで装備されており,音は110デシベル以上で,はっきりと,声も高く,ユニークな"電子ノイズダイナミック・ロックループ抑制回路"デザインで,電子ノイズを完全に排除します.
知的衝突回避と障害物回避機能
レーザー障害物回避センサーを使用し,ロボットが障害物に出くわしたとき自動的に停止し,アラームを鳴らします.これは大きな視角,迅速な応答,高い感度という特徴を持っています.
自動充電機能
自動充電技術により 遠隔検査路に複数の充電ステーションを配置できます 電力量が少ない場合は 最寄りの充電ステーションを見つけ 独立して充電できます
多センサーの核融合検出
ロボットは低温湿度センサーを搭載し, ロボットの環境の温度と湿度をリアルタイムで感知できる. 温度と姿勢センサーを搭載し, ロボット体内の内部温度,姿勢,加速等をリアルタイムで取得し, 収集したデータをコマンドセンターにアップロードできる.
精密位置位置付け機能
ロボットは正確なマイレージ位置付けアルゴリズムを使用し RFIDベースの位置付けアルゴリズム技術と組み合わせて位置付け精度は最高センチメートルレベルに達し,リアルタイムで独自の位置情報をアップロードすることができ, 便利な監視と管理です
製品上の利点
●超低温に適応性があり,低温環境で信頼性のある作業が可能
●吊り歩行モード,小さなスペースを占有し,人材に影響を及ぼさない,環境への適応性が良い
● 位置認識方法,走行距離計算とRFID位置位置付け技術の組み合わせで,位置付け精度はセンチメートルまで
● 姿勢分析機能により,自動速度調節を実現し,様々な複雑な道路条件でロボットのスムーズな動作を保証します.
●自動または手動検査機能で,異常状況が検出された場合,自動アラーム
●データ交換と共有を実現するために他のモニタリングプラットフォームに接続できます.
●ロボットが4G/5G/WiFiマルチネットワークモード通信をサポートします.
● 先進的な無線モバイル通信技術,長い通信距離,強力な反干渉
● 鉱山設備とのドッキングと統合の機能があり,インテリジェント・マイン統合システムの全体的な統合を容易にする.
●モバイルアプリのローカル制御機能で,現場での操作が便利です.





